ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving
ApolloCar3D: A Large 3D Car Instance Understanding Benchmark for Autonomous Driving
- 介绍
- 从图像中理解物体的3D特性,例如3D姿态和形状
- 当前方法都依赖于lidar,但是lidar有很多缺点
- 前视覆盖度差,特别是远处和absorbing region
- 数据集
- 数据获取
- 图像从ApolloScape中获取,高分辨率 3384 * 2710,>140k 带语义标注,复杂驾驶环境
- 从4个不同的城市选取标注视频,选取标准:
- 相对复杂的环境
- 相邻帧间隔>=10
- 使用了数据集原本的语义标注进行选取后,又手工筛选,为了在车的尺寸,形状,方向还有车之间互相遮挡都保持多样性,最终选取了5277张图片
- 3D车模型
- 高精确度的车模型要求:反投之后的mask和手工标注的mask平均误差3像素,shapenet无法满足,因此让人工标注员根据给定车型的形状和尺寸进行建模,最后共获取34个真实模型,包括:轿车,轿跑,小货车,suv,mpv
- 数据统计信息
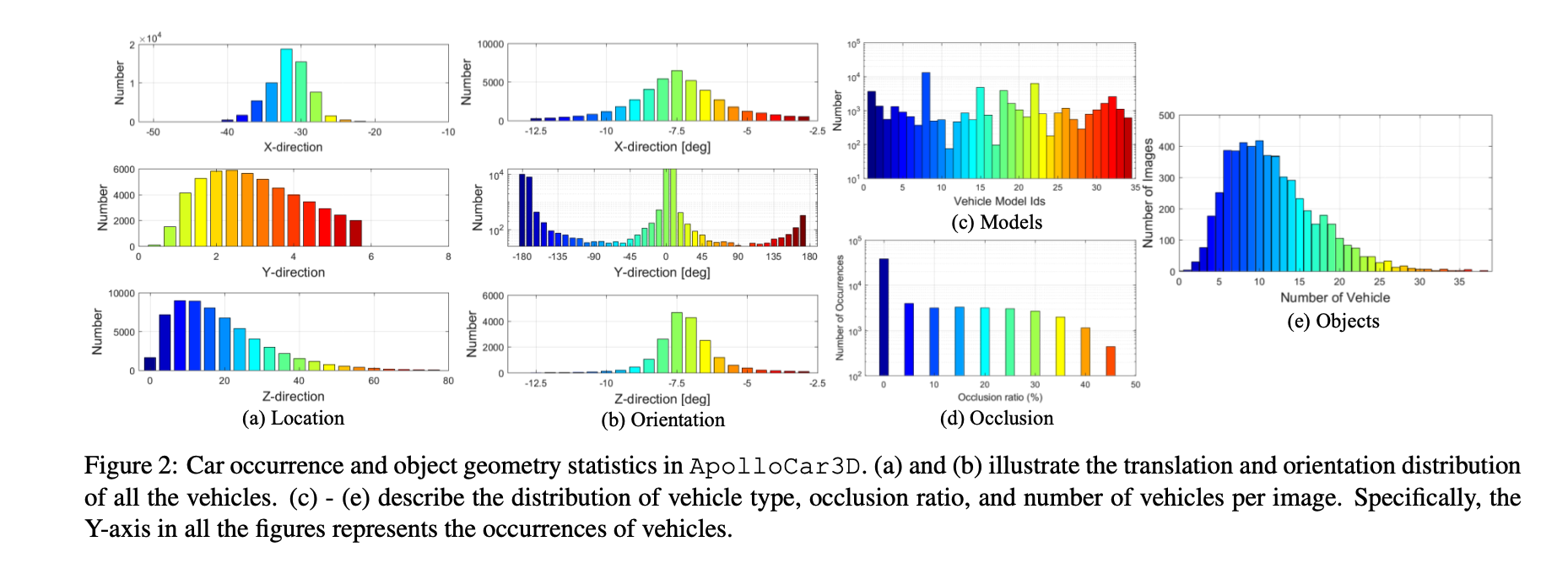
- 方向:大部分车前后向开
- 轿车最多
- 大部分图片有多于10个标注出的车
- context-aware 3d 关键点标注
- 借助于高质量3D模型,开发了一个高效的机器辅助的半自动关键点标注过程,只要求标注员在图像中点击一组预设的关键点,之后使用EPnP算法通过反投影自动重建3d实例的pose和模型。使用ransac来处理异常点和错误标注
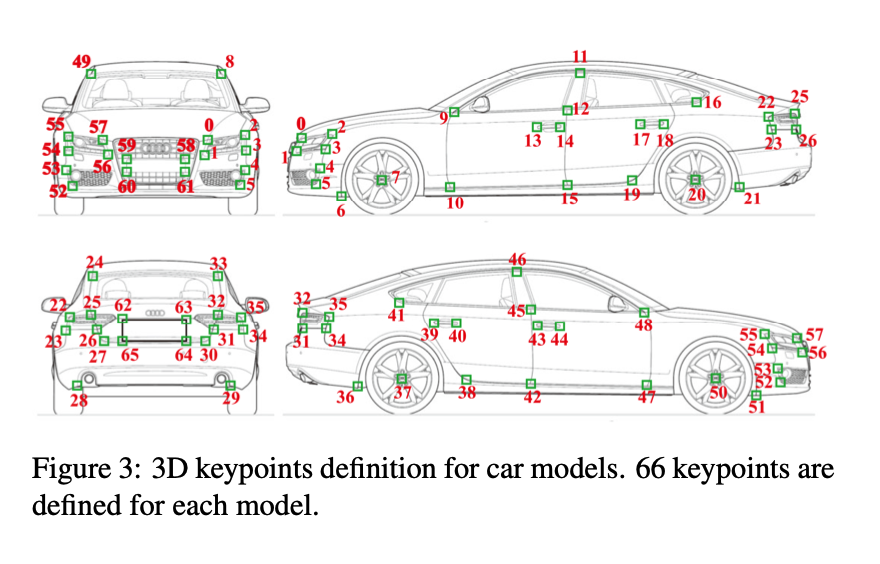
- 解EPnP只需要少数关键点,这里定义了66个关键点,冗余度保证了更准确和鲁棒的形状姿态配准
- 遮挡严重的时候,RANSAC会失效。这里提出一个环境感知的标注过程,加入了车与车之间co-planar的限制,这样可以在相邻的车之间propagate信息,可以同时解这一区域多辆车的信息
- 优化目标: 所有车辆的 PnP 和 背景感知共面约束
- $B(K_c)$ 代表当前车是否需要borrow pose from 邻居车,条件为:标注出来的关键点大于6并且同时标注的关键点同时在多于车的两个表面(前左后右,table 2)
- 标注的关键点的平均值的距离被用来找neighbour,最多使用2个neighbour
- 实现优化有密集关键点标注的车,通过exhausting所有车种类的方式。要求平均重投影误差小于5个像素并且重投影便捷小于5个像素。当有多个车匹配上的时候,选取投影误差最小的那个。然后再优化关键点相对少的车,通过邻居车辆提供背景信息。当大多数车都aligned之后,再让人类标注员进行视觉上的验证和结果调整
- 两个基线算法
- 现有工作
- CarFusion: Combining Point Tracking and Part Detection for Dynamic 3D Reconstruction of Vehicles
- addressing 3d instance understanding from a single image in an uncontrolled environment is ill-posed
- 3D-RCNN,直接法,不依赖关键点,依赖2d mask作为输入
- DeepMANTA 依赖关键点
- 直接法
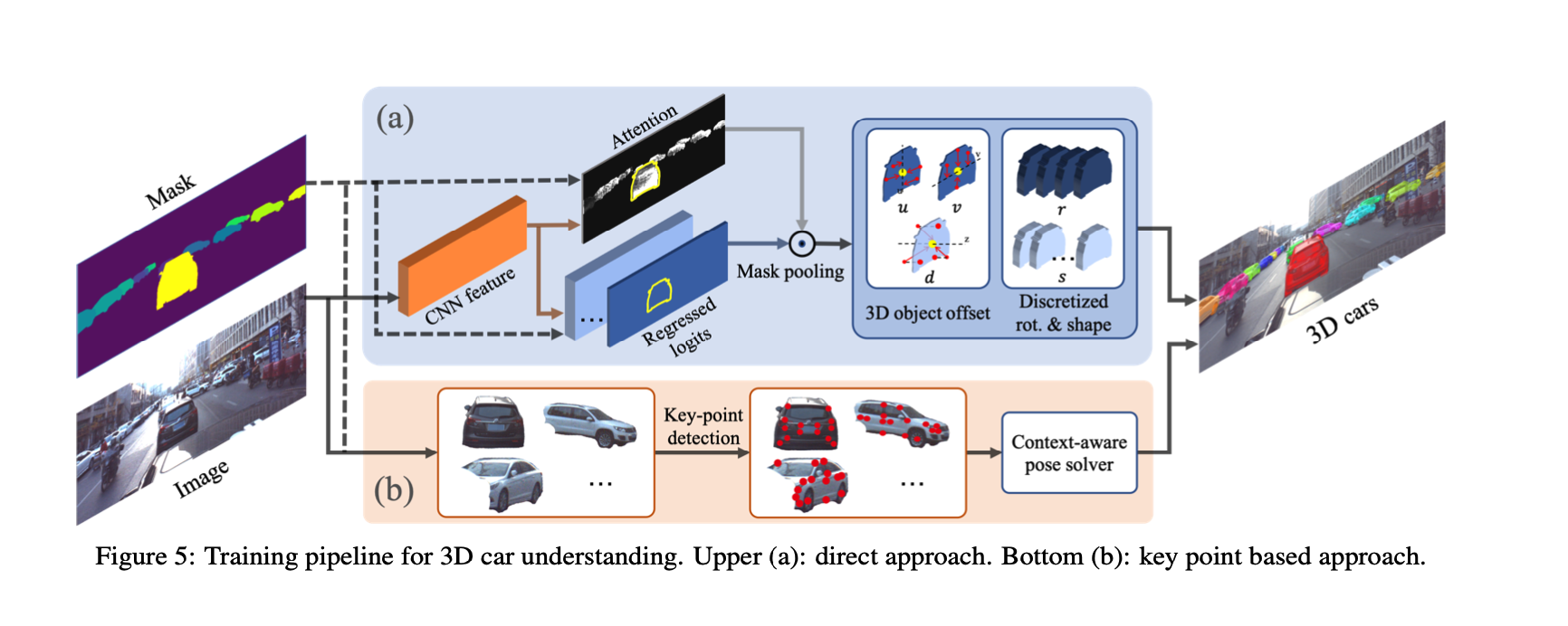
- 3D-RCNN,使用ROI pooling 从全卷积特征提取器中crop出每个car instance对应的feature,然后接一个全连接层预测2d amodal center,allocentric rotation and PCA-based shape parameters. 使用同样的策略,旋转和形状的回归输出空间都是离散的。然而,对于深度估计,这里使用了深度真值作为监督,而不是像3D-RCNN里面一样通过amodal box并枚举深度来让投影的mask 去 match box。因此这里把非模态box回归替换成深度回归,使用类似(Deep ordinal regression network for monocular depth estimation)的深度离散策略来给出深度估算的SOTA结果
- 为了获取detailed shape understanding, 在原来pipeline基础上又做了两个改进:
- 3d 形状姿态估计对畸变敏感,roi相当于是对车instance做perspective distortion,所以这里把ROI pooling替换成全卷积结构,并做像素级的pose和shape的回归,简单但更高效。然后使用self attention对一个instance mask内部所有的预测进行特征选择。这里把feature aggregation叫作mask pooling因为这一步为每一个mask选取最重要的信息
- 对于估算车辆translation,即amodal center和深度,使用每一个像素针对车辆3d中心的offset而不是对每一个像素使用same target,这样提供更强的监督并使网络更鲁棒
- 关键点法
- 当关键点足够的时候,基于DeepMANTA的一种方法
- 使用SOTA 2d关键点检测算法CPM,之前是用于人体姿态估计,这里实验结果也不错
- 2d 关键点法相比于直接法的优势是,不需要回归全局深度或者scale,通常这些预测都不太可靠。输入到图像中的是cropped image而非全图
- 首先使用EPnP 解决easy case(关键点多的时候),然后将信息propagate到邻居车直到所有的车pose和shape互相都一致,这种有co-planar限制的车位姿估计算法这里命名为 car pose solver
- 实验
- 实验细节:
- 4036 train 200 validation 1041 testing
- 复现了 3D-RCNN和DeepMANTA
- 使用了图森复现的MaskRCNN
- 使用了 DeepLabv3 with Xception65提取出全卷积特征
- DeepMANTA 使用了 CPM进行关键点预测
- 4036 training images 中含有40000 标注2d特征点的车辆,用来训练CPM (5 stages of CPM and VGG-16 初始化)
- 评价指标
- AP 对于box级别的衡量不够精细
- 3d bounding box IOU with orientation (average orientation similarity AOS)
- 2D bounding box with viewpoint (average viewpoint precision AVP)
- mesh distance and voxel IOU 通常用来评价3d形状重建
- we consider comparing projection masks of two models following the idea of visual hull representation
- 选取了yaw角100个朝向,然后将model投影到1280*1280的图像上面,使用所有view的 mean IOU作为车形状相似度度量。
- 使用 metrics commonly used by camera pose estimation 作为rotation and translation的度量,
- 只evaluate 100m以内的车,因为他们更和自动驾驶任务相关
- 量化结果
- 使用Mask Pooling代替roi pooling,和offset flow带来很多效果提升,避免了常规roi pooling带来的几何形变
- DeepMANTA:检测关键点,然后使用PnP对每一辆车求解。使用GT MASK替代 MASKRCNN的输出性能降的很少,证明了MASK RCNN性能很好
- 让人对val set进行了一次标注,结果明显好于算法,但是人为标注结果也不令人满意,主要原因是标注员无法记住所有66个关键点的语义,导致解出来的pose是错的,这一步可以通过rechecking来提升效果
- 关键点检测:先抠图,然后用CPM训练,pixel distance 在10以内就认为是true positive, detection rate 75.41%, 平均像素误差在4.39,人标注的detection rate 92.40%, 平均像素误差2.67px
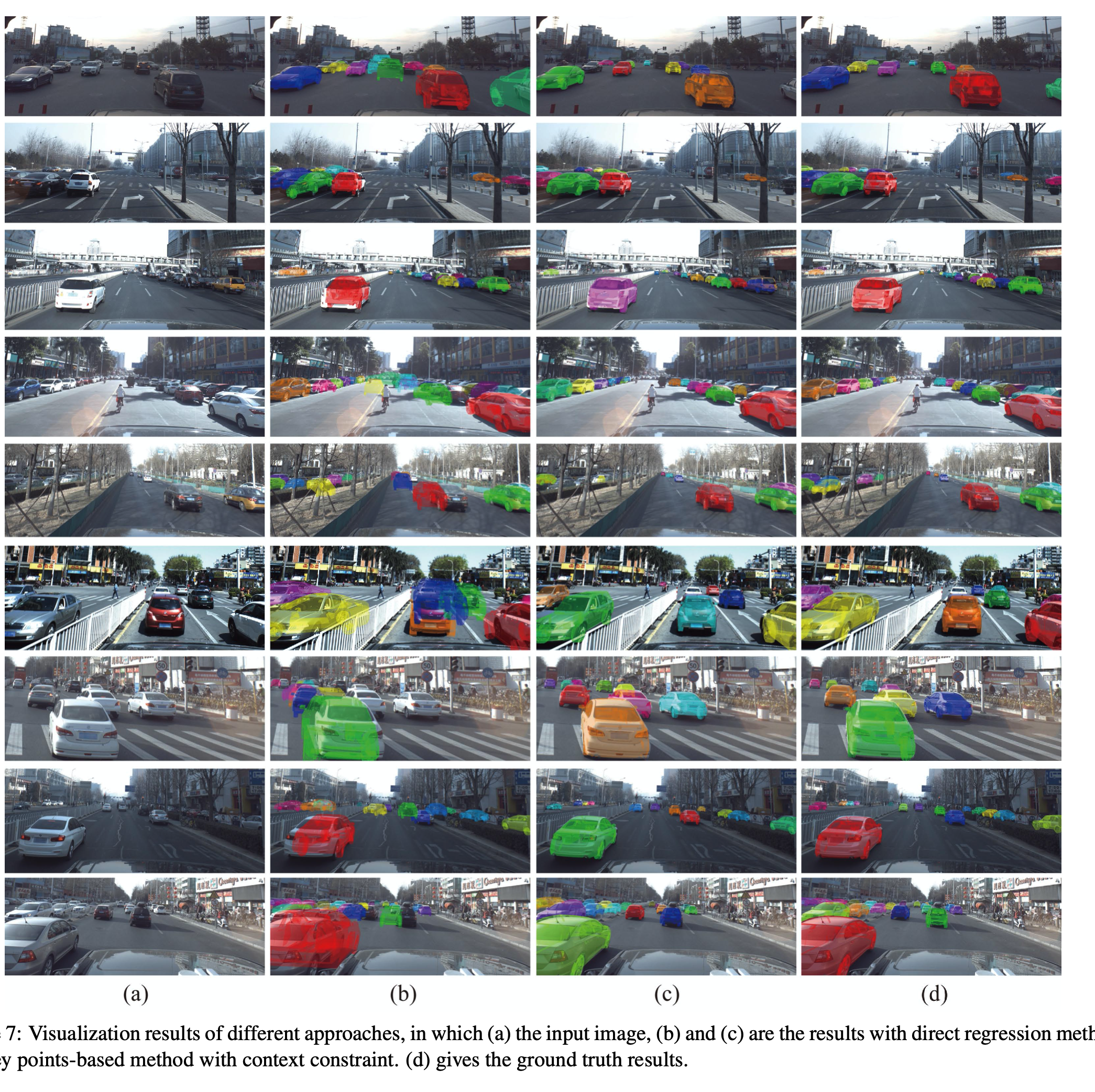
- 定性实验结果
- 有额外关键点信息的方法比直接法结果更精确,实际上,对于直接法,大部分错误来自于深度估计,从2d外观来直接估计3d深度特征这个问题是ill-posed and error-prone的,然后,因为使用了可靠的mask,该方法比关键点法找到了更多的车
- 关键点法非常依赖关键点的检测准确度,一旦关键点检测的很好,car pose估计的也很好,反之亦然
- 结果分析
- 非遮挡的车结果反而最差,是因为这些车通常在远距离,尺寸也小